Прежде чем приступить к тематике статьи, напомним основные понятия.
Определение 1
Вектор – отрезок прямой, характеризующийся численным значением и направлением. Вектор обозначается строчной латинской буквой со стрелкой сверху. При наличии конкретных точек границ обозначение вектора выглядит как две прописные латинские буквы (маркирующие границы вектора) также со стрелкой сверху.
Определение 2
Нулевой вектор – любая точка плоскости, обозначается как нуль со стрелкой сверху.
Определение 3
Длина вектора – величина, равная или большая нуля, определяющая длину отрезка, составляющего вектор.
Определение 4
Коллинеарные векторы – лежащие на одной прямой или на параллельных прямых. Не выполняющие это условие векторы называют неколлинеарными.
Определение 5Исходные данные: векторы a → и b → . Для выполнения над ними операции сложения необходимо из произвольной точки undefined отложить вектор A B → , равный вектору а → ; из полученной точки undefined – вектор В С → , равный вектору b → . Соединив точки undefined и C , получаем отрезок (вектор) А С → , который и будет являться суммой исходных данных. Иначе описанную схему сложения векторов называют правилом треугольника.
Геометрически сложение векторов выглядит так:
Для неколлинеарных векторов:
Для коллинеарных (сонаправленных или противоположнонаправленных) векторов:

Взяв за основу описанную выше схему, мы получаем возможность произвести операцию сложения векторов в количестве более 2: поочередно прибавляя каждый последующий вектор.
Определение 6
Исходные данные: векторы a → , b → , c → , d → . Из произвольной точки А на плоскости необходимо отложить отрезок (вектор), равный вектору a → ; затем от конца полученного вектора откладывается вектор, равный вектору b → ; далее – по тому же принципу откладываются последующие векторы. Конечной точкой последнего отложенного вектора будет точка B , а полученный отрезок (вектор) A B → – суммой всех исходных данных. Описанную схему сложения нескольких векторов называют также правилом многоугольника .
Геометрически оно выглядит следующим образом:

Определение 7
Отдельной схемы действия по вычитанию векторов нет, т.к. по сути разность векторов a → и b → есть сумма векторов a → и - b → .
Определение 8Чтобы произвести действие умножения вектора на некое число k , необходимо учитывать следующие правила:
- если k > 1 , то это число приведет к растяжению вектора в k раз;
- если 0 < k < 1 , то это число приведет к сжатию вектора в
1 k раз;
- если k < 0 , то это число приведет к смене направления вектора при одновременном выполнении одного из первых двух правил;
- если k = 1 , то вектор остается прежним;
- если одно из множителей – нулевой вектор или число, равное нулю, результатом умножения будет нулевой вектор.
Исходные данные:
1) вектор a →
и число k = 2 ;
2) вектор b →
и число k = - 1 3 .
Геометрически результат умножения в соответствии с указанными выше правилами будет выглядеть следующим образом:

Описанным выше операциям над векторами присущи свойства, некоторые из которых очевидны, а прочие можно обосновать геометрически.
Исходные данные: векторы a → , b → , c → и произвольные действительные числа λ и μ .

Свойства коммутативности и ассоциативности дают возможность складывать векторы в произвольном порядке.
Перечисленные свойства операций позволяют осуществлять необходимые преобразования векторно-числовых выражений аналогично привычным числовым. Рассмотрим это на примере.
Пример 1
Задача:
упростить выражение a → - 2 · (b → + 3 · a →)
Решение
- используя второе распределительное свойство, получим: a → - 2 · (b → + 3 · a →) = a → - 2 · b → - 2 · (3 · a →)
- задействуем сочетательное свойство умножения, выражение приобретет следующий вид: a → - 2 · b → - 2 · (3 · a →) = a → - 2 · b → - (2 · 3) · a → = a → - 2 · b → - 6 · a →
- используя свойство коммутативности, меняем местами слагаемые: a → - 2 · b → - 6 · a → = a → - 6 · a → - 2 · b →
- затем по первому распределительному свойству получаем: a → - 6 · a → - 2 · b → = (1 - 6) · a → - 2 · b → = - 5 · a → - 2 · b → Краткая запись решения будет выглядеть так: a → - 2 · (b → + 3 · a →) = a → - 2 · b → - 2 · 3 · a → = 5 · a → - 2 · b →
Ответ:
a → - 2 · (b → + 3 · a →) = - 5 · a → - 2 · b →
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter
Будут и задачи для самостоятельного решения, к которым можно посмотреть ответы.
Понятие вектора
Прежде чем Вы узнаете всё о векторах и операциях над ними, настройтесь на решение несложной задачи. Есть вектор Вашей предприимчивости и вектор Ваших инновационных способностей. Вектор предприимчивости ведёт Вас к Цели 1, а вектор инновационных способностей - к Цели 2. Правила игры таковы, что Вы не можете двигаться сразу по направлениям двух этих векторов и достигнуть сразу двух целей. Векторы взаимодействуют, или, если говорить математическим языком, над векторами производится некоторая операция. Результатом этой операции становится вектор "Результат", который приводит Вас к Цели 3.
А теперь скажите: результатом какой операции над векторами "Предприимчивость" и "Инновационные способности" является вектор "Результат"? Если не можете сказать сразу, не унывайте. По мере изучения этого урока Вы сможете ответить на этот вопрос.
Как мы уже увидели выше, вектор обязательно идёт от некоторой точки A по прямой к некоторой точке B . Следовательно, каждый вектор имеет не только числовое значение - длину, но также физическое и геометрическое - направленность. Из этого выводится первое, самое простое определение вектора. Итак, вектор - это направленный отрезок, идущий от точки A к точке B . Обозначается он так: .

А чтобы приступить к различным операциям с векторами , нам нужно познакомиться с ещё одним определением вектора.
Вектор - это вид представления точки, до которой требуется добраться из некоторой начальной точки. Например, трёхмерный вектор, как правило, записывается в виде (х, y, z ) . Говоря совсем просто, эти числа означают, как далеко требуется пройти в трёх различных направлениях, чтобы добраться до точки.
Пусть дан вектор. При этом x = 3 (правая рука указывает направо), y = 1 (левая рука указывает вперёд), z = 5 (под точкой стоит лестница, ведущая вверх). По этим данным вы найдёте точку, проходя 3 метра в направлении, указываемом правой рукой, затем 1 метр в направлении, указываемом левой рукой, а далее Вас ждёт лестница и, поднимаясь на 5 метров, Вы, наконец, окажетесь в конечной точке.
Все остальные термины - это уточнения представленного выше объяснения, необходимые для различных операций над векторами, то есть, решения практических задач. Пройдёмся по этим более строгим определениям, останавливаясь на типичных задачах на векторы.
Физическими примерами векторных величин могут служить смещение материальной точки, двигающейся в пространстве, скорость и ускорение этой точки, а также действующая на неё сила.

Геометрический вектор представлен в двумерном и трёхмерном пространстве в виде направленного отрезка . Это отрезок, у которого различают начало и конец.
Если A - начало вектора, а B - его конец, то вектор обозначается символом или одной строчной буквой . На рисунке конец вектора указывается стрелкой (рис. 1)
Длиной (или модулем ) геометрического вектора называется длина порождающего его отрезка
Два вектора называются равными , если они могут быть совмещены (при совпадении направлений) путём параллельного переноса, т.е. если они параллельны, направлены в одну и ту же сторону и имеют равные длины.
В физике часто рассматриваются закреплённые векторы , заданные точкой приложения, длиной и направлением. Если точка приложения вектора не имеет значения, то его можно переносить, сохраняя длину и направление в любую точку пространства. В этом случае вектор называется свободным . Мы договоримся рассматривать только свободные векторы .
Линейные операции над геометрическими векторами

Умножение вектора на число
Произведением вектора на число называется вектор, получающийся из вектора растяжением (при ) или сжатием (при ) в раз, причём направление вектора сохраняется, если , и меняется на противоположное, если . (Рис. 2)
Из определения следует, что векторы и = всегда расположены на одной или на параллельных прямых. Такие векторы называются коллинеарными . (Можно говорить также, что эти векторы параллельны, однако в векторной алгебре принято говорить "коллинеарны".) Справедливо и обратное утверждение: если векторы и коллинеарны, то они связаны отношением
Следовательно, равенство (1) выражает условие коллинеарности двух векторов.

Сложение и вычитание векторов
При сложении векторов нужно знать, что суммой векторов и называется вектор , начало которого совпадает с началом вектора , а конец - с концом вектора , при условии, что начало вектора приложено к концу вектора . (Рис. 3)

Это определение может быть распределено на любое конечное число векторов. Пусть в пространстве даны n
свободных векторов . При сложении
нескольких векторов за их сумму принимают замыкающий вектор, начало которого
совпадает с началом первого вектора, а конец - с концом последнего вектора. То есть, если к концу вектора
приложить начало вектора , а к концу вектора
- начало вектора и т.д. и, наконец, к концу вектора
- начало вектора , то
суммой этих векторов служит замыкающий вектор ![]() , начало которого совпадает с началом первого вектора
, а конец - с концом последнего вектора . (Рис. 4)
, начало которого совпадает с началом первого вектора
, а конец - с концом последнего вектора . (Рис. 4)
Слагаемые называются составляющими вектора , а сформулированное правило - правилом многоугольника . Этот многоугольник может и не быть плоским.
При умножении вектора на число -1 получается противоположный вектор . Векторы и имеют одинаковые длины и противоположные направления. Их сумма даёт нулевой вектор , длина которого равна нулю. Направление нулевого вектора не определено.
В векторной алгебре нет необходимости рассматривать отдельно операцию вычитания: вычесть из вектора
вектор
означает прибавить к вектору противоположный вектор
, т.е. ![]()
Пример 1. Упростить выражение:
![]() .
.
 ,
,
то есть, векторы можно складывать и умножать на числа так же, как и многочлены (в частности, также задачи на упрощение выражений). Обычно необходимость упрощать линейно подобные выражения с векторами возникает перед вычислением произведений векторов.
Пример 2. Векторы и служат диагоналями параллелограмма ABCD (рис. 4а). Выразить через и векторы , , и , являющиеся сторонами этого параллелограмма.
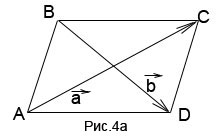
Решение. Точка пересечения диагоналей параллелограмма делит каждую диагональ пополам. Длины требуемых в условии задачи векторов находим либо как половины сумм векторов, образующих с искомыми треугольник, либо как половины разностей (в зависимости от направления вектора, служащего диагональю), либо, как в последнем случае, половины суммы, взятой со знаком минус. Результат - требуемые в условии задачи векторы:

Есть все основания полагать, что теперь Вы правильно ответили на вопрос о векторах "Предприимчивость" и "Инновационные способности" в начале этого урока. Правильный ответ: над этими векторами производится операция сложения.
Решить задачи на векторы самостоятельно, а затем посмотреть решения
Как найти длину суммы векторов?
Эта задача занимает особое место в операциях с векторами, так как предполагает использование тригонометрических свойств. Допустим, Вам попалась задача вроде следующей:
Даны длины векторов ![]() и длина суммы этих векторов .
Найти длину разности этих векторов .
и длина суммы этих векторов .
Найти длину разности этих векторов .
Решения этой и других подобных задач и объяснения, как их решать - в уроке "Сложение векторов: длина суммы векторов и теорема косинусов ".
А проверить решение таких задач можно на Калькуляторе онлайн "Неизвестная сторона треугольника (сложение векторов и теорема косинусов)" .
А где произведения векторов?
Произведения вектора на вектор не являются линейными операциями и рассматриваются отдельно. И у нас есть уроки "Скалярное произведение векторов " и "Векторное и смешанное произведения векторов ".
Проекция вектора на ось
Проекция вектора на ось равна произведению длины проектируемого вектора на косинус угла между вектором и осью:
![]()
Как известно, проекцией точки A на прямую (плоскость) служит основание перпендикуляра , опущенного из этой точки на прямую (плоскость).

Пусть - произвольный вектор (Рис. 5), а и - проекции его начала (точки A ) и конца (точки B ) на ось l . (Для построения проекции точки A ) на прямую проводим через точку A плоскость, перпендикулярную прямой. Пересечение прямой и плоскости определит требуемую проекцию.
Составляющей вектора на оси l называется такой вектор , лежащий на этой оси, начало которого совпадает с проекцией начала, а конец - с проекцией конца вектора .
Проекцией вектора на ось l называется число
![]() ,
,
равное длине составляющего вектора на этой оси, взятое со знаком плюс, если направление составляюшей совпадает с направлением оси l , и со знаком минус, если эти направления противоположны.
Основные свойства проекций вектора на ось:
1. Проекции равных векторов на одну и ту же ось равны между собой.
2. При умножении вектора на число его проекция умножается на это же число.
3. Проекция суммы векторов на какую-либо ось равна сумме проекций на эту же ось слагаемых векторов.
4. Проекция вектора на ось равна произведению длины проектируемого вектора на косинус угла между вектором и осью:
![]()
 .
.

Решение. Спроектируем векторы на ось l как определено в теоретической справке выше. Из рис.5а очевидно, что проекция суммы векторов равна сумме проекций векторов. Вычисляем эти проекции:
Находим окончательную проекцию суммы векторов:
Связь вектора с прямоугольной декартовой системой координат в пространстве
Знакомство с прямоугольной декартовой системой координат в пространстве состоялось в соответствующем уроке , желательно открыть его в новом окне.
В упорядоченной системе координатных осей 0xyz ось Ox называется осью абсцисс , ось 0y – осью ординат , и ось 0z – осью аппликат .

С произвольной точкой М пространства свяжем вектор
называемый радиус-вектором точки М и спроецируем его на каждую из координатных осей. Обозначим величины соответствующих проекций:
Числа x, y, z называются координатами точки М , соответственно абсциссой , ординатой и аппликатой , и записываются в виде упорядоченной точки чисел: M (x; y; z) (рис.6).
Вектор единичной длины, направление которого совпадает с направлением оси, называют единичным вектором (или ортом ) оси. Обозначим через
Соответственно орты координатных осей Ox , Oy , Oz
![]()
Теорема. Всякий вектор может быть разложен по ортам координатных осей:

![]() (2)
(2)
Равенство (2) называется разложением вектора по координатным осям. Коэффициентами этого разложения являются проекции вектора на координатные оси. Таким образом, коэффициентами разложения (2) вектора по координатным осям являются координаты вектора.
После выбора в пространстве определённой системы координат вектор и тройка его координат однозначно определяют друг друга, поэтому вектор может быть записан в форме
Представления вектора в виде (2) и (3) тождественны.
Условие коллинеарности векторов в координатах
Как мы уже отмечали, векторы называются коллинеарными, если они связаны отношением
Пусть даны векторы ![]() .
Эти векторы коллинеарны, если координаты векторов связаны отношением
.
Эти векторы коллинеарны, если координаты векторов связаны отношением
![]() ,
,
то есть, координаты векторов пропорциональны.
Пример 6.
Даны векторы ![]() .
Коллинеарны ли эти векторы?
.
Коллинеарны ли эти векторы?
Решение. Выясним соотношение координат данных векторов:
![]() .
.
Координаты векторов пропорциональны, следовательно, векторы коллинеарны, или, что то же самое, параллельны.
Длина вектора и направляющие косинусы
Вследствие взаимной перпендикулярности координатных осей длина вектора
![]()
равна длине диагонали прямоугольного параллелепипеда, построенного на векторах
и выражается равенством
![]() (4)
(4)
Вектор полностью определяется заданием двух точек (начала и конца), поэтому координаты вектора можно выразить через координаты этих точек.
Пусть в заданной системе координат начало вектора находится в точке
а конец – в точке

Из равенства
Следует, что
или в координатной форме
Следовательно, координаты вектора равны разностям одноимённых координат конца и начала вектора . Формула (4) в этом случае примет вид
Направление вектора определяют направляющие косинусы . Это косинусы углов, которые вектор образует с осями Ox , Oy и Oz . Обозначим эти углы соответственно α , β и γ . Тогда косинусы этих углов можно найти по формулам
Направляющие косинусы вектора являются также координатами орта этого вектора и, таким образом, орт вектора

![]() .
.
Учитывая, что длина орта вектора равна одной единице, то есть
![]() ,
,
получаем следующее равенство для направляющих косинусов:
Пример 7. Найти длину вектора x = (3; 0; 4).
Решение. Длина вектора равна
![]()
Пример 8. Даны точки:
Выяснить, равнобедренный ли треугольник, построенный на этих точках.
Решение. По формуле длины вектора (6) найдём длины сторон и установим, есть ли среди них две равные:

Две равные стороны нашлись, следовательно необходимость искать длину третьей стороны отпадает, а заданный треугольник является равнобедренным.
Пример 9.
Найти длину вектора
и его направляющие косинусы, если ![]() .
.
Решение. Координаты вектора даны:
![]() .
.
Длина вектора равна квадратному корню из суммы квадратов координат вектора:
![]() .
.
Находим направляющие косинусы:

Решить задачу на векторы самостоятельно, а затем посмотреть решение
Операции над векторами, заданными в координатной форме
Пусть даны два вектора и , заданные своими проекциями:
![]()
![]()
Укажем действия над этими векторами.
1. Определение вектора. Длина вектора. Коллинеарность, компланарность векторов.
Вектором называется направленный отрезок. Длиной или модулем вектора называется длина соответствующего направленного отрезка.
Модуль вектора a обозначается . Векторa называется единичным, если . Векторы называются коллинеарными, если они параллельны одной прямой. Векторы называются компланарными, если они параллельны одной плоскости.
2. Умножение вектора на число. Свойства операции.
Умножение вектора на число, даёт противоположно направленный вектор в длиной враз больше. Умножение вектора на число в координатной форме производится умножением всех координат на это число:
Исходя из определения получается выражение для модуля вектора, умноженного на число:
![]()
Аналогично как и числами, операции сложение вектора с самим с собой можно записать через умножение на число:
А вычитание векторов можно переписать через сложение и умножение:
![]()
Исходя из того, что умножение на не меняет длины вектора, а меняет только направление и учитывая определение вектора, получаем:
![]()
3. Сложение векторов, вычитание векторов.
В координатном представлении вектор суммы получается суммированием соответствующих координат слагаемых:
Для геометрического построения вектора суммы используют различные правила (методы), однако они все дают одинаковый результат. Использование того или иного правила обосновывается решаемой задачей.
Правило треугольника
Правило треугольника наиболее естественно следует из понимания вектора как переноса. Ясно, что результат последовательного применения двух переносов инекоторой точки будет тем же, что применение сразу одного переноса, соответствующего этому правилу. Для сложения двух векторовипо правилутреугольника оба эти вектора переносятся параллельно самим себе так, чтобы начало одного из них совпадало с концом другого. Тогда вектор суммы задаётся третьей стороной образовавшегося треугольника, причём его начало совпадает с началом первого вектора, а конец с концом второго вектора.
Это правило прямо и естественно обобщается для сложения любого количества векторов, переходя в правило ломаной :
Правило многоугольника
Начало второго вектора совмещается с концом первого, начало третьего - с концом второго и так далее, сумма же векторов есть вектор, с началом, совпадающим с началом первого, и концом, совпадающим с концом-го (то есть изображается направленным отрезком, замыкающим ломаную). Так же называется правилом ломаной.
Правило параллелограмма
Для сложения двух векторов ипо правилупараллелограмма оба эти векторы переносятся параллельно самим себе так, чтобы их начала совпадали. Тогда вектор суммы задаётся диагональю построенного на них параллелограмма, исходящей из их общего начала. (Легко видеть, что эта диагональ совпадает с третьей стороной треугольника при использовании правила треугольника).
Правило параллелограмма особенно удобно, когда есть потребность изобразить вектор суммы сразу же приложенным к той же точке, к которой приложены оба слагаемых - то есть изобразить все три вектора имеющими общее начало.
Модуль суммы векторов
Модуль суммы двух векторов можно вычислить, использую теорему косинусов :
Где - косинус угла между векторамии.
Если векторы изображены в соответствии с правилом треугольника и берется угол по рисунку - между сторонами треугольника - что не совпадает с обычным определением угла между векторами, а значит и с углом в приведенной формуле, то последний член приобретает знак минус, что соответствует теореме косинусов в ее прямой формулировке.
Для суммы произвольного количества векторов применима аналогичная формула, в которой членов с косинусом больше: по одному такому члену существует для каждой пары векторов из суммируемого набора. Например, для трех векторов формула выглядит так:
Вычитание векторов

Два вектора и вектор их разности
Для получения разности в координатной форме надо вычесть соответствующие координаты векторов:
Для получения вектора разности начала векторов соединяются и началом векторабудет конец, а концом - конец. Если записать, используя точки векторов, то.
Модуль разности векторов
Три вектора , как и при сложении, образуют треугольник, и выражение для модуля разности получается аналогичным:
где - косинус угла между векторамии
Отличие от формулы модуля суммы в знаке перед косинусом, при этом надо хорошо следить, какой именно угол берется (вариант формулы модуля суммы с углом между сторонами треугольника при суммировании по правилу треугольника по виду не отличается от данной формулы для модуля разности, но надо иметь в виду, что для тут берутся разные углы: в случае суммы берётся угол, когда вектор переносится к концу вектора, когда же ищется модель разности, берётся угол между векторами, приложенными к одной точке; выражение для модуля суммы с использованием того же угла, что в данном выражении для модуля разности, отличается знаком перед косинусом).
| " |
Прежде всего надо разобрать само понятие вектора. Для того, чтобы ввести определение геометрического вектора вспомним, что такое отрезок . Введем следующее определение.
Определение 1
Отрезком будем называть часть прямой, которая имеет две границы в виде точек.
Отрезок может иметь 2 направления. Для обозначения направления будем называть одну из границ отрезка его началом, а другую границу - его концом. Направление указывается от его начала к концу отрезка.
Определение 2
Вектором или направленным отрезком будем называть такой отрезок, для которого известно, какая из границ отрезка считается началом, а какая его концом.
Обозначение: Двумя буквами: $\overline{AB}$ – (где $A$ его начало, а $B$ – его конец).
Одной маленькой буквой: $\overline{a}$ (рис. 1).
Введем теперь, непосредственно, понятие длин вектора.
Определение 3
Длиной вектора $\overline{a}$ будем называть длину отрезка $a$.
Обозначение: $|\overline{a}|$
Понятие длины вектора связано, к примеру, с таким понятием, как равенство двух векторов.
Определение 4
Два вектора будем называть равными, если они удовлетворяют двух условиям: 1. Они сонаправлены; 1. Их длины равны (рис. 2).
Для того, чтобы определять векторы вводят систему координат и определяют координаты для вектора во введенной системе. Как мы знаем, любой вектор можно разложить в виде $\overline{c}=m\overline{i}+n\overline{j}$, где $m$ и $n$ – действительные числа, а $\overline{i}$ и $\overline{j}$ - единичные векторы на оси $Ox$ и $Oy$, соответственно.
Определение 5
Коэффициенты разложения вектора $\overline{c}=m\overline{i}+n\overline{j}$ будем называть координатами этого вектора во введенной системе координат. Математически:
$\overline{c}={m,n}$
Как найти длину вектора?
Для того, чтобы вывести формулу для вычисления длины произвольного вектора по данным его координатам рассмотрим следующую задачу:
Пример 1
Дано: вектор $\overline{α}$, имеющий координаты ${x,y}$. Найти: длину этого вектора.
Введем на плоскости декартову систему координат $xOy$. От начал введенной системы координат отложим $\overline{OA}=\overline{a}$. Построим проекции $OA_1$ и $OA_2$ построенного вектора на оси $Ox$ и $Oy$, соответственно (рис. 3).
Построенный нами вектор $\overline{OA}$ будет радиус вектором для точки $A$, следовательно, она будет иметь координаты ${x,y}$, значит
$=x$, $[ OA_2]=y$
Теперь мы легко можем найти искомую длину с помощью теоремы Пифагора, получим
$|\overline{α}|^2=^2+^2$
$|\overline{α}|^2=x^2+y^2$
$|\overline{α}|=\sqrt{x^2+y^2}$
Ответ: $\sqrt{x^2+y^2}$.
Вывод: Чтобы найти длину вектора, у которого задан его координаты, необходимо найти корень из квадрата суммы этих координат.
Пример задач
Пример 2
Найдите расстояние между точками $X$ и $Y$, которые имеют следующие координаты: $(-1,5)$ и $(7,3)$, соответственно.
Любые две точки можно легко связать с понятием вектора. Рассмотрим, к примеру, вектор $\overline{XY}$. Как мы уже знаем, координаты такого вектора можно найти, вычтя из координат конечной точки ($Y$) соответствующие координаты начальной точки ($X$). Получим, что

Стандартное определение: «Вектор - это направленный отрезок». Обычно этим и ограничиваются знания выпускника о векторах. Кому нужны какие-то «направленные отрезки»?
А в самом деле, что такое векторы и зачем они?
Прогноз погоды. «Ветер северо-западный, скорость 18
метров в секунду». Согласитесь, имеет значение и направление ветра (откуда он дует), и модуль (то есть абсолютная величина) его скорости.
Величины, не имеющие направления, называются скалярными. Масса, работа, электрический заряд никуда не направлены. Они характеризуются лишь числовым значением - «сколько килограмм» или «сколько джоулей».
Физические величины, имеющие не только абсолютное значение, но и направление, называются векторными.
Скорость, сила, ускорение - векторы. Для них важно «сколько» и важно «куда». Например, ускорение свободного падения направлено к поверхности Земли, а величина его равна 9,8 м/с 2 . Импульс, напряженность электрического поля, индукция магнитного поля - тоже векторные величины.
Вы помните, что физические величины обозначают буквами, латинскими или греческими. Стрелочка над буквой показывает, что величина является векторной:
Вот другой пример.
Автомобиль движется из A
в B
. Конечный результат - его перемещение из точки A
в точку B
, то есть перемещение на вектор  .
.

Теперь понятно, почему вектор - это направленный отрезок. Обратите внимание, конец вектора - там, где стрелочка. Длиной вектора называется длина этого отрезка. Обозначается: или
До сих пор мы работали со скалярными величинами, по правилам арифметики и элементарной алгебры. Векторы - новое понятие. Это другой класс математических объектов. Для них свои правила.
Когда-то мы и о числах ничего не знали. Знакомство с ними началось в младших классах. Оказалось, что числа можно сравнивать друг с другом, складывать, вычитать, умножать и делить. Мы узнали, что есть число единица и число ноль.
Теперь мы знакомимся с векторами.
Понятия «больше» и «меньше» для векторов не существует - ведь направления их могут быть разными. Сравнивать можно только длины векторов.
А вот понятие равенства для векторов есть.
Равными
называются векторы, имеющие одинаковые длины и одинаковое направление. Это значит, что вектор можно перенести параллельно себе в любую точку плоскости.
Единичным
называется вектор, длина которого равна 1
. Нулевым - вектор, длина которого равна нулю, то есть его начало совпадает с концом.
Удобнее всего работать с векторами в прямоугольной системе координат - той самой, в которой рисуем графики функций. Каждой точке в системе координат соответствуют два числа - ее координаты по x
и y
, абсцисса и ордината.
Вектор также задается двумя координатами:
Здесь в скобках записаны координаты вектора - по x
и по y
.
Находятся они просто: координата конца вектора минус координата его начала.

Если координаты вектора заданы, его длина находится по формуле

Сложение векторов
Для сложения векторов есть два способа.
1 . Правило параллелограмма. Чтобы сложить векторы и , помещаем начала обоих в одну точку. Достраиваем до параллелограмма и из той же точки проводим диагональ параллелограмма. Это и будет сумма векторов и .

Помните басню про лебедя, рака и щуку? Они очень старались, но так и не сдвинули воз с места. Ведь векторная сумма сил, приложенных ими к возу, была равна нулю.
2 . Второй способ сложения векторов - правило треугольника. Возьмем те же векторы и . К концу первого вектора пристроим начало второго. Теперь соединим начало первого и конец второго. Это и есть сумма векторов и .

По тому же правилу можно сложить и несколько векторов. Пристраиваем их один за другим, а затем соединяем начало первого с концом последнего.

Представьте, что вы идете из пункта А в пункт В , из В в С , из С в D , затем в Е и в F . Конечный результат этих действий - перемещение из А в F .
При сложении векторов и получаем:
![]()
Вычитание векторов
Вектор направлен противоположно вектору . Длины векторов и равны.
Теперь понятно, что такое вычитание векторов. Разность векторов и - это сумма вектора и вектора .

Умножение вектора на число
При умножении вектора на число k получается вектор, длина которого в k раз отличается от длины . Он сонаправлен с вектором , если k больше нуля, и направлен противоположно , если k меньше нуля.

Скалярное произведение векторов
Векторы можно умножать не только на числа, но и друг на друга.
Скалярным произведением векторов называется произведение длин векторов на косинус угла между ними.

Обратите внимание - перемножили два вектора, а получился скаляр, то есть число. Например, в физике механическая работа равна скалярному произведению двух векторов - силы и перемещения:
![]()
Если векторы перпендикулярны, их скалярное произведение равно нулю.
А вот так скалярное произведение выражается через координаты векторов и :
Из формулы для скалярного произведения можно найти угол между векторами:

Эта формула особенно удобна в стереометрии. Например, в задаче 14 Профильного ЕГЭ по математике нужно найти угол между скрещивающимися прямыми или между прямой и плоскостью. Часто задача 14 решается в несколько раз быстрее, чем классическим.
В школьной программе по математике изучают только скалярное произведение векторов.
Оказывается, кроме скалярного, есть еще и векторное произведение, когда в результате умножения двух векторов получается вектор. Кто сдает ЕГЭ по физике , знает, что такое сила Лоренца и сила Ампера. В формулы для нахождения этих сил входят именно векторные произведения.
Векторы - полезнейший математический инструмент. В этом вы убедитесь на первом курсе.
